#include <X2DPrismaticJointComponent.h>
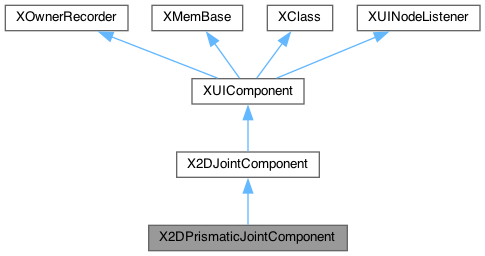
类 X2DPrismaticJointComponent 继承关系图:
变量 | |
| X2DPrismaticJointComponent = {} | |
函数说明
◆ Create()
| function X2DPrismaticJointComponent Create | ( | pNode | ) |
创建一个X2DPrismaticJointComponent碰撞组件
- 参数
-
pNode XUINode 目标节点
- 返回
- X2DPrismaticJointComponent 创建出的X2DPrismaticJointComponent组件
◆ EnableLimit()
| function X2DPrismaticJointComponent EnableLimit | ( | xelua_var_51 | ) |
◆ EnableMotor()
| function X2DPrismaticJointComponent EnableMotor | ( | xelua_var_52 | ) |
◆ GetLocalAxisA()
| function X2DPrismaticJointComponent GetLocalAxisA | ( | ) |
移动轴向
- 返回
- XVECTOR2
◆ GetLowerTranslation()
| function X2DPrismaticJointComponent GetLowerTranslation | ( | ) |
最小移动距离限制
- 返回
- number
◆ GetMaxMotorForce()
| function X2DPrismaticJointComponent GetMaxMotorForce | ( | ) |
可以施加到刚体的最大力。
- 返回
- number
◆ GetMotorSpeed()
| function X2DPrismaticJointComponent GetMotorSpeed | ( | ) |
期望的马达速度。
- 返回
- number
◆ GetReferenceAngle()
| function X2DPrismaticJointComponent GetReferenceAngle | ( | ) |
A与B的相对角度
- 返回
- number
◆ GetUpperTranslation()
| function X2DPrismaticJointComponent GetUpperTranslation | ( | ) |
最大移动距离限制
- 返回
- number
◆ IsEnableLimit()
| function X2DPrismaticJointComponent IsEnableLimit | ( | ) |
是否开启限制
- 返回
- boolean
◆ IsEnableMotor()
| function X2DPrismaticJointComponent IsEnableMotor | ( | ) |
开启关节马达(线速度
- 返回
- boolean
◆ SetLocalAxisA()
| function X2DPrismaticJointComponent SetLocalAxisA | ( | xelua_var_45 | ) |
◆ SetLowerTranslation()
| function X2DPrismaticJointComponent SetLowerTranslation | ( | xelua_var_47 | ) |
◆ SetMaxMotorForce()
| function X2DPrismaticJointComponent SetMaxMotorForce | ( | xelua_var_50 | ) |
◆ SetMotorSpeed()
| function X2DPrismaticJointComponent SetMotorSpeed | ( | xelua_var_49 | ) |
◆ SetReferenceAngle()
| function X2DPrismaticJointComponent SetReferenceAngle | ( | xelua_var_46 | ) |
◆ SetUpperTranslation()
| function X2DPrismaticJointComponent SetUpperTranslation | ( | xelua_var_48 | ) |
变量说明
◆ X2DPrismaticJointComponent
制作者