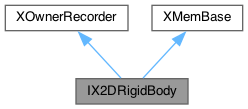
#include <IX2DRigidBody.h>
#include <IX2DRigidBody.h>
|
| function X2DRigidBodyDesc | new () end |
| |
| function IX2DRigidBody | CreateFixture (def) end |
| |
| function IX2DRigidBody | CreateFixture (pShape, fDensity) end |
| |
| function IX2DRigidBody | GetPosition () end |
| |
| function IX2DRigidBody | GetAngle () end |
| |
| function IX2DRigidBody | SetLinearVelocity (vVelocity) end |
| |
| function IX2DRigidBody | GetLinearVelocity () end |
| |
| function IX2DRigidBody | SetAngularVelocity (fAngle) end |
| |
| function IX2DRigidBody | GetAngularVelocity () end |
| |
| function IX2DRigidBody | ApplyForce (force, point, wake) end |
| |
| function IX2DRigidBody | ApplyForceToCenter (force, wake) end |
| |
| function IX2DRigidBody | ApplyTorque (torque, wake) end |
| |
| function IX2DRigidBody | ApplyLinearImpulse (impulse, point, wake) end |
| |
| function IX2DRigidBody | ApplyLinearImpulseToCenter (impulse, wake) end |
| |
| function IX2DRigidBody | ApplyAngularImpulse (impulse, wake) end |
| |
| function IX2DRigidBody | SetBullet (flag) end |
| |
| function IX2DRigidBody | IsBullet () end |
| |
| function IX2DRigidBody | SetAwake (flag) end |
| |
| function IX2DRigidBody | IsAwake () end |
| |
| function IX2DRigidBody | SetTransform (vPosition, fAngle) end |
| |
◆ ApplyAngularImpulse()
给刚体施加角速度变化
- 参数
-
| impulse | number 变化量 |
| wake | boolean 是否唤醒刚体 |
- 返回
- void
◆ ApplyForce()
◆ ApplyForceToCenter()
在刚体重心位置施加一个力
- 参数
-
| force | XVECTOR2 力的方向和大小 |
| wake | boolean 是否唤醒刚体 |
- 返回
- void
◆ ApplyLinearImpulse()
| function IX2DRigidBody ApplyLinearImpulse |
( |
impulse |
, |
|
|
point |
, |
|
|
wake |
|
|
) |
| |
◆ ApplyLinearImpulseToCenter()
| function IX2DRigidBody ApplyLinearImpulseToCenter |
( |
impulse |
, |
|
|
wake |
|
|
) |
| |
◆ ApplyTorque()
给刚体施加一个扭矩
- 参数
-
| torque | number 扭矩大小 |
| wake | boolean 是否唤醒刚体 |
- 返回
- void
◆ CreateFixture() [1/2]
◆ CreateFixture() [2/2]
◆ GetAngle()
获取2D刚体旋转弧度
- 返回
- number 刚体旋转弧度
◆ GetAngularVelocity()
◆ GetLinearVelocity()
◆ GetPosition()
◆ IsAwake()
◆ IsBullet()
获取是否为Bullet类型
- 返回
- boolean Bullet类型
◆ new()
◆ SetAngularVelocity()
◆ SetAwake()
◆ SetBullet()
设置刚体是否为Bullet类型, Bullet类型可以防止高速物体穿透现象
- 参数
-
- 返回
- void
◆ SetLinearVelocity()
◆ SetTransform()
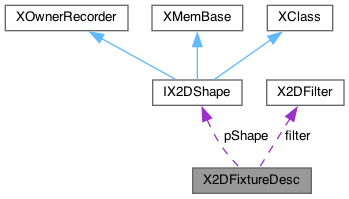
◆ X2DRigidBodyDesc
◆ X_DYNAMIC
◆ X_KINEMATIC
◆ X_STATIC