


Variables | |
| X_2DPHYSICS_JT_UNKNOWN = 0 | |
| X_2DPHYSICS_JT_REVOLUTE = 0 | |
| X_2DPHYSICS_JT_PRISMATIC = 0 | |
| X_2DPHYSICS_JT_DISTANCE = 0 | |
| X_2DPHYSICS_JT_PULLEY = 0 | |
| X_2DPHYSICS_JT_MOUSE = 0 | |
| X_2DPHYSICS_JT_GEAR = 0 | |
| X_2DPHYSICS_JT_WHEEL = 0 | |
| X_2DPHYSICS_JT_WELD = 0 | |
| X_2DPHYSICS_JT_FRICTION = 0 | |
| X_2DPHYSICS_JT_ROPE = 0 | |
| X_2DPHYSICS_JT_MOTOR = 0 | |
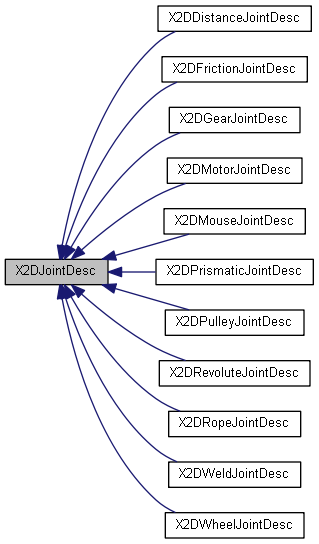
| X2DJointDesc = {} | |
Function Documentation
◆ EnableLimit()
| function IX2DPrismaticJoint EnableLimit | ( | flag | ) |
请参考描述类
- Parameters
-
flag boolean
- Returns
- void
◆ EnableMotor()
| function IX2DWheelJoint EnableMotor | ( | flag | ) |
请参考描述类
- Parameters
-
flag boolean
- Returns
- void
◆ GetAnchorA()
| function IX2DJoint GetAnchorA | ( | ) |
获取关节在刚体A上的锚点
- Returns
- XVECTOR2 锚点位置
◆ GetAnchorB()
| function IX2DJoint GetAnchorB | ( | ) |
获取关节在刚体B上的锚点
- Returns
- XVECTOR2 锚点位置
◆ GetAngularOffset()
| function IX2DMotorJoint GetAngularOffset | ( | ) |
请参考描述类
- Returns
- number
◆ GetBodyA()
| function IX2DJoint GetBodyA | ( | ) |
获取关节连接的刚体A
- Returns
- IX2DRigidBody 刚体A
◆ GetBodyB()
| function IX2DJoint GetBodyB | ( | ) |
获取关节连接的刚体B
- Returns
- IX2DRigidBody 刚体B
◆ GetCorrectionFactor()
| function IX2DMotorJoint GetCorrectionFactor | ( | ) |
请参考描述类
- Returns
- number
◆ GetCurrentLengthA()
| function IX2DPulleyJoint GetCurrentLengthA | ( | ) |
请参考描述类
- Returns
- number
◆ GetCurrentLengthB()
| function IX2DPulleyJoint GetCurrentLengthB | ( | ) |
请参考描述类
- Returns
- number
◆ GetDampingRatio()
| function IX2DWeldJoint GetDampingRatio | ( | ) |
请参考描述类
- Returns
- number
◆ GetFrequency()
| function IX2DWeldJoint GetFrequency | ( | ) |
请参考描述类
- Returns
- number
◆ GetGroundAnchorA()
| function IX2DPulleyJoint GetGroundAnchorA | ( | ) |
请参考描述类
- Returns
- XVECTOR2
◆ GetGroundAnchorB()
| function IX2DPulleyJoint GetGroundAnchorB | ( | ) |
请参考描述类
- Returns
- XVECTOR2
◆ GetJointA()
| function IX2DGearJoint GetJointA | ( | ) |
请参考描述类
- Returns
- IX2DJoint
◆ GetJointAngle()
| function IX2DWheelJoint GetJointAngle | ( | ) |
请参考描述类
- Returns
- number
◆ GetJointAngularSpeed()
| function IX2DWheelJoint GetJointAngularSpeed | ( | ) |
请参考描述类
- Returns
- number
◆ GetJointB()
| function IX2DGearJoint GetJointB | ( | ) |
请参考描述类
- Returns
- IX2DJoint
◆ GetJointLinearSpeed()
| function IX2DWheelJoint GetJointLinearSpeed | ( | ) |
请参考描述类
- Returns
- number
◆ GetJointSpeed()
| function IX2DPrismaticJoint GetJointSpeed | ( | ) |
请参考描述类
- Returns
- number
◆ GetJointTranslation()
| function IX2DWheelJoint GetJointTranslation | ( | ) |
请参考描述类
- Returns
- number
◆ GetLength()
| function IX2DDistanceJoint GetLength | ( | ) |
请参考描述类
- Returns
- number
◆ GetLengthA()
| function IX2DPulleyJoint GetLengthA | ( | ) |
请参考描述类
- Returns
- number
◆ GetLengthB()
| function IX2DPulleyJoint GetLengthB | ( | ) |
请参考描述类
- Returns
- number
◆ GetLinearOffset()
| function IX2DMotorJoint GetLinearOffset | ( | ) |
请参考描述类
- Returns
- XVECTOR2
◆ GetLocalAnchorA()
| function IX2DRopeJoint GetLocalAnchorA | ( | ) |
请参考描述类
- Returns
- XVECTOR2
◆ GetLocalAnchorB()
| function IX2DRopeJoint GetLocalAnchorB | ( | ) |
请参考描述类
- Returns
- XVECTOR2
◆ GetLocalAxisA()
| function IX2DWheelJoint GetLocalAxisA | ( | ) |
请参考描述类
- Returns
- XVECTOR2
◆ GetLowerLimit()
| function IX2DPrismaticJoint GetLowerLimit | ( | ) |
请参考描述类
- Returns
- number
◆ GetMaxForce()
| function IX2DMotorJoint GetMaxForce | ( | ) |
请参考描述类
- Returns
- number
◆ GetMaxLength()
| function IX2DRopeJoint GetMaxLength | ( | ) |
请参考描述类
- Returns
- number
◆ GetMaxMotorForce()
| function IX2DPrismaticJoint GetMaxMotorForce | ( | ) |
请参考描述类
- Returns
- number
◆ GetMaxMotorTorque()
| function IX2DWheelJoint GetMaxMotorTorque | ( | ) |
请参考描述类
- Returns
- number
◆ GetMaxTorque()
| function IX2DMotorJoint GetMaxTorque | ( | ) |
请参考描述类
- Returns
- number
◆ GetMotorForce()
| function IX2DPrismaticJoint GetMotorForce | ( | inv_dt | ) |
请参考描述类
- Parameters
-
inv_dt number
- Returns
- number
◆ GetMotorSpeed()
| function IX2DWheelJoint GetMotorSpeed | ( | ) |
请参考描述类
- Returns
- number
◆ GetMotorTorque()
| function IX2DWheelJoint GetMotorTorque | ( | inv_dt | ) |
请参考描述类
- Parameters
-
inv_dt number
- Returns
- number
◆ GetRatio()
| function IX2DGearJoint GetRatio | ( | ) |
请参考描述类
- Returns
- number
◆ GetReactionForce()
| function IX2DJoint GetReactionForce | ( | inv_dt | ) |
获取关节的力大小
- Parameters
-
inv_dt number
- Returns
- XVECTOR2 力
◆ GetReactionTorque()
| function IX2DJoint GetReactionTorque | ( | inv_dt | ) |
获取关节的扭矩
- Parameters
-
inv_dt number
- Returns
- number 扭矩
◆ GetReferenceAngle()
| function IX2DWeldJoint GetReferenceAngle | ( | ) |
请参考描述类
- Returns
- number
◆ GetSpringDampingRatio()
| function IX2DWheelJoint GetSpringDampingRatio | ( | ) |
请参考描述类
- Returns
- number
◆ GetSpringFrequencyHz()
| function IX2DWheelJoint GetSpringFrequencyHz | ( | ) |
请参考描述类
- Returns
- number
◆ GetTarget()
| function IX2DMouseJoint GetTarget | ( | ) |
请参考描述类
- Returns
- XVECTOR2
◆ GetType()
| function IX2DJoint GetType | ( | ) |
返回关节类型
- Returns
- number 关节类型
◆ GetUpperLimit()
| function IX2DPrismaticJoint GetUpperLimit | ( | ) |
请参考描述类
- Returns
- number
◆ GetUserData()
| function IX2DJoint GetUserData | ( | ) |
获取用户自定义数据
- Returns
- userdata 用户自定义数据
◆ Init() [1/5]
| function X2DFrictionJointDesc Init | ( | pA | , |
| pB | , | ||
| vAnchor | |||
| ) |
初始化一个X2DRevoluteJointDesc
- Parameters
-
pA IX2DRigidBody 刚体B pB IX2DRigidBody vAnchor XVECTOR2 连接锚点
- Returns
- boolean 成功返回xtrue,失败返回xfalse
◆ Init() [2/5]
| function X2DWheelJointDesc Init | ( | pA | , |
| pB | , | ||
| vAnchor | , | ||
| vAxis | |||
| ) |
初始化一个X2DRevoluteJointDesc
- Parameters
-
pA IX2DRigidBody 刚体B pB IX2DRigidBody vAnchor XVECTOR2 连接锚点 vAxis XVECTOR2
- Returns
- boolean 成功返回xtrue,失败返回xfalse
◆ Init() [3/5]
| function X2DDistanceJointDesc Init | ( | pA | , |
| pB | , | ||
| vAnchorA | , | ||
| vAnchorB | |||
| ) |
初始化一个X2DRevoluteJointDesc
- Parameters
-
pA IX2DRigidBody 刚体B pB IX2DRigidBody vAnchorA XVECTOR2 vAnchorB XVECTOR2 连接锚点
- Returns
- boolean 成功返回xtrue,失败返回xfalse
◆ Init() [4/5]
| function X2DPulleyJointDesc Init | ( | pA | , |
| pB | , | ||
| vGAnchorA | , | ||
| vGAnchorB | , | ||
| vAnchorA | , | ||
| vAnchorB | , | ||
| ratio | |||
| ) |
初始化一个X2DRevoluteJointDesc
- Parameters
-
pA IX2DRigidBody 刚体B pB IX2DRigidBody vGAnchorA XVECTOR2 vGAnchorB XVECTOR2 vAnchorA XVECTOR2 vAnchorB XVECTOR2 连接锚点 ratio number
- Returns
- boolean 成功返回xtrue,失败返回xfalse
◆ Init() [5/5]
| function X2DMotorJointDesc Init | ( | pA | , |
| pB | |||
| ) |
初始化一个X2DRevoluteJointDesc
- Parameters
-
pA IX2DRigidBody 刚体B pB IX2DRigidBody
- Returns
- boolean 成功返回xtrue,失败返回xfalse
◆ IsActive()
| function IX2DJoint IsActive | ( | ) |
是否激活
- Returns
- boolean
◆ IsLimitEnabled()
| function IX2DPrismaticJoint IsLimitEnabled | ( | ) |
请参考描述类
- Returns
- boolean
◆ IsMotorEnabled()
| function IX2DWheelJoint IsMotorEnabled | ( | ) |
请参考描述类
- Returns
- boolean
◆ new()
| function X2DJointDesc new | ( | ) |
X2DJointDesc_new00
- Returns
- X2DJointDesc
X2DRevoluteJointDesc_new00
- Returns
- X2DRevoluteJointDesc
X2DPrismaticJointDesc_new00
- Returns
- X2DPrismaticJointDesc
X2DDistanceJointDesc_new00
- Returns
- X2DDistanceJointDesc
X2DPulleyJointDesc_new00
- Returns
- X2DPulleyJointDesc
X2DMouseJointDesc_new00
- Returns
- X2DMouseJointDesc
X2DGearJointDesc_new00
- Returns
- X2DGearJointDesc
X2DWheelJointDesc_new00
- Returns
- X2DWheelJointDesc
X2DWeldJointDesc_new00
- Returns
- X2DWeldJointDesc
X2DFrictionJointDesc_new00
- Returns
- X2DFrictionJointDesc
X2DRopeJointDesc_new00
- Returns
- X2DRopeJointDesc
X2DMotorJointDesc_new00
- Returns
- X2DMotorJointDesc
◆ SetAngularOffset()
| function IX2DMotorJoint SetAngularOffset | ( | angularOffset | ) |
请参考描述类
- Parameters
-
angularOffset number
- Returns
- void
◆ SetCorrectionFactor()
| function IX2DMotorJoint SetCorrectionFactor | ( | factor | ) |
请参考描述类
- Parameters
-
factor number
- Returns
- void
◆ SetDampingRatio()
| function IX2DWeldJoint SetDampingRatio | ( | ratio | ) |
请参考描述类
- Parameters
-
ratio number
- Returns
- void
◆ SetFrequency()
| function IX2DWeldJoint SetFrequency | ( | hz | ) |
请参考描述类
- Parameters
-
hz number
- Returns
- void
◆ SetLength()
| function IX2DDistanceJoint SetLength | ( | length | ) |
请参考描述类
- Parameters
-
length number
- Returns
- void
◆ SetLimits()
| function IX2DPrismaticJoint SetLimits | ( | lower | , |
| upper | |||
| ) |
请参考描述类
- Parameters
-
lower number upper number
- Returns
- void
◆ SetLinearOffset()
| function IX2DMotorJoint SetLinearOffset | ( | linearOffset | ) |
请参考描述类
- Parameters
-
linearOffset XVECTOR2
- Returns
- void
◆ SetMaxForce()
| function IX2DMotorJoint SetMaxForce | ( | force | ) |
请参考描述类
- Parameters
-
force number
- Returns
- void
◆ SetMaxLength()
| function IX2DRopeJoint SetMaxLength | ( | length | ) |
请参考描述类
- Parameters
-
length number
- Returns
- void
◆ SetMaxMotorForce()
| function IX2DPrismaticJoint SetMaxMotorForce | ( | force | ) |
请参考描述类
- Parameters
-
force number
- Returns
- void
◆ SetMaxMotorTorque()
| function IX2DWheelJoint SetMaxMotorTorque | ( | torque | ) |
请参考描述类
- Parameters
-
torque number
- Returns
- void
◆ SetMaxTorque()
| function IX2DMotorJoint SetMaxTorque | ( | torque | ) |
请参考描述类
- Parameters
-
torque number
- Returns
- void
◆ SetMotorSpeed()
| function IX2DWheelJoint SetMotorSpeed | ( | speed | ) |
请参考描述类
- Parameters
-
speed number
- Returns
- void
◆ SetRatio()
| function IX2DGearJoint SetRatio | ( | fRatio | ) |
请参考描述类
- Parameters
-
fRatio number
- Returns
- void
◆ SetSpringDampingRatio()
| function IX2DWheelJoint SetSpringDampingRatio | ( | ratio | ) |
请参考描述类
- Parameters
-
ratio number
- Returns
- void
◆ SetSpringFrequencyHz()
| function IX2DWheelJoint SetSpringFrequencyHz | ( | hz | ) |
请参考描述类
- Parameters
-
hz number
- Returns
- void
◆ SetTarget()
| function IX2DMouseJoint SetTarget | ( | target | ) |
请参考描述类
- Parameters
-
target XVECTOR2
- Returns
- void
◆ SetUserData()
| function IX2DJoint SetUserData | ( | pUserData | ) |
设置用户自定义数据
- Parameters
-
pUserData userdata
- Returns
- void
Variable Documentation
◆ X2DJointDesc
| X2DJointDesc = {} |
◆ X_2DPHYSICS_JT_DISTANCE
| X_2DPHYSICS_JT_DISTANCE = 0 |
◆ X_2DPHYSICS_JT_FRICTION
| X_2DPHYSICS_JT_FRICTION = 0 |
◆ X_2DPHYSICS_JT_GEAR
| X_2DPHYSICS_JT_GEAR = 0 |
◆ X_2DPHYSICS_JT_MOTOR
| X_2DPHYSICS_JT_MOTOR = 0 |
◆ X_2DPHYSICS_JT_MOUSE
| X_2DPHYSICS_JT_MOUSE = 0 |
◆ X_2DPHYSICS_JT_PRISMATIC
| X_2DPHYSICS_JT_PRISMATIC = 0 |
◆ X_2DPHYSICS_JT_PULLEY
| X_2DPHYSICS_JT_PULLEY = 0 |
◆ X_2DPHYSICS_JT_REVOLUTE
| X_2DPHYSICS_JT_REVOLUTE = 0 |
◆ X_2DPHYSICS_JT_ROPE
| X_2DPHYSICS_JT_ROPE = 0 |
◆ X_2DPHYSICS_JT_UNKNOWN
| X_2DPHYSICS_JT_UNKNOWN = 0 |
◆ X_2DPHYSICS_JT_WELD
| X_2DPHYSICS_JT_WELD = 0 |
◆ X_2DPHYSICS_JT_WHEEL
| X_2DPHYSICS_JT_WHEEL = 0 |
Generated by
 1.8.15
1.8.15